Unelte utilizator
Bara de navigare
Aceasta e o versiune anterioară a paginii.
Cuprins
Tema 2: GPS tracker
Obiective
- Înțelegerea conceptului de graf și a modurilor de parcurgere aferente
- Aplicarea algoritmilor studiați pe topologie graf într-un exemplu practic
Descriere
Sistemul Global de Poziționare (sau GPS) este o rețea de aproximativ 30 de sateliți care orbitează în jurul Pământului, la o altitudine de 20.000km. Acesta a fost dezvoltat de guvernul Statelor Unite în scop militar, dar oricine folosește acum un dispozitiv GPS poate recepționa semnalele radio pe care sateliții le fac broadcast.
Oriunde te afli pe planetă, cel puțin 3 sateliți sunt 'vizibili' la un moment dat. Fiecare transmite informații despre poziția sa și timpul curent la anumite intervale. Aceste semnale sunt interceptate de dispozitivul GPS care calculează cât de departe e satelitul, în funcție de cât de mult îi ia mesajului să ajungă.
Odată ce acesta are informații despre cât de departe cei trei sateliți sunt, receiver-ul GPS poate indica locația folosind un proces numit trilaterație .
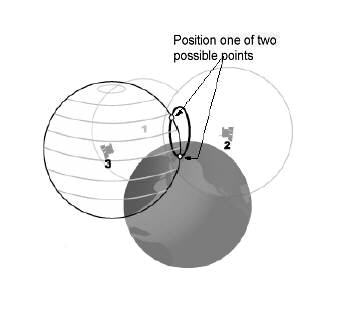
Trilaterația (măsurarea distanțelor, nu a unghiurilor)
Imaginează-ți că stai undeva pe Pământ cu 3 sateliți deasupra ta. Dacă știi cât de departe ești de satelitul A, atunci trebuie să te afli undeva în cercul roșu. Dacă consideri la fel pentru sateliții B și C, poți afla locația ta precisă calculând intersecția celor 3 cercuri. Asta este ceea ce receiver-ul GPS-ul tău face, deși acesta consideră sfere suprapuse.

Precizări
Vom considera ca fișier de intrare coordonate.in, în care pe prima linie vom avea un număr N care va reprezenta câte locații depistează sateliții noștri.
Pe următoarele linii vom avea pentru fiecare locație:
- nume locație
- coordonate (x1, y1) satelit1
- raza R satelit1
- coordonate (x2, y2) satelit2
- raza R satelit2
- coordonate (x3, y3) satelit3
- raza R satelit3
Coordonatele și raza se consideră date de fiecare satelit pentru fiecare dintre cele N locații.
Datorită distanței mult mai mari de la Pământ la sateliți, față de diferența de înălțime între sateliți, ei se pot considera în același plan (z1 = z2 = z3 = z). Între cele 3 sfere există așadar cel mult 2 puncte de intersecție, obținându-le prin găsirea triadelor (x,y,z) care să satisfacă ecuațiile sferei.
Atenție: pentru a nu greși la calcule, se recomandă scrierea ecuațiilor celor 3 cercuri și aflarea coordonatelor unei locații prin calcularea punctului de intersecție; fiecare locație va fi considerată ca fiind un nod al grafului prin care ne construim drumurile de la o locație la alta.
(x-x1)2 + (y-y1)2 = R12
(x-x2)2 + (y-y2)2 = R22
(x-x3)2 + (y-y2)2 = R32
Se consideră prima coordonată calculată, locul din care plecăm.
Știind coordonatele tuturor locațiilor, vom considera costul de la o locație la cealaltă distanța dintre cele 2 puncte în plan.
Vom primi un update printr-un fișier avarii.in drumurile avariate dintre 2 locații, pe care nu se poate merge.
Cerințe
Executabilul obținut în urma compilării va avea numele gps, iar regula de execuție va fi:
unde numele destinației reprezintă locația unde vrem să ajungem pornind din nodul pe care am zis că-l vom considera nod de plecare.
În fișierul coord_finale.out se vor scrie numele și perechea (x,y) de coordonate calculate pentru fiecare locație, în ordinea citirii lor din fișierul de intrare coordonate.in
Având toate aceste date, vrem să calculăm care este cel mai scurt drum de la nodul de plecare, la cel destinație, pe care îl vom scrie în fișierul rezultat.out .
Exemplu (date fictive momentan, nu e test real!!)
| coordonate.in | avarii.in | coord_finale.out | rezultat.out |
|---|---|---|---|
| 5 | dalas denver | 12 7 | 12 |
| dalas | 2 3 | ||
| 12 13 2 | 1 3 | ||
| 10 9 3 | 1 3 | ||
| 12 8 2 | 1 3 | ||
| denver | |||
| 2 7 4 | |||
| 2 8 5 | |||
| 4 6 4 | |||
| texas | |||
| 2 3 4 | |||
| 2 3 4 | |||
| 2 3 4 | |||
| maryland | |||
| 2 3 4 | |||
| 2 3 4 | |||
| 2 3 4 | |||
| ilinois | |||
| 2 3 4 | |||
| 2 3 4 | |||
| 2 3 4 |
Reguli pentru trimitere
- Arhiva temei va avea numele GrupaSerie_Nume_Prenume_TemaNr.zip și va fi încărcată pe vmchecker, unde vă puteți loga folosind credențialele de pe acs.curs
- Ea va conține (direct în rădăcină):
- fișierul main.c </br>
- Makefile-ul (cu regulile make pentru executabilul gps și clean)
- fișierul README în care va fi descrisă soluția problemei
- Dacă veți calcula coordonatele spațiale pentru toate locațiile (adică fișierul de ieșire coord_finale.out e integral corect pentru un test), se poate obține punctaj parțial de 50p
- Dacă soluția voastră nu compilează, dar dacă ideea este bună și trimiteți o încercare de implementare, puteți primi până la 20p
- Temele care vor fi copiate vor primi 0p
Referințe
